分子ロボットを100万も集合させ、複数の仕事を同時にこなせる分子群ロボットを作る
Published : 2020.06.16 / DOI : 10.1080/14686996.2020.1761761
組み込まれたプログラム、ないしは与えられた情報に基づいて、自身を取り巻く周囲の状況を評価し、自律的に仕事をこなすことのできる分子ロボットの研究が発展しつつある。2016年のノーベル化学賞「分子マシンの設計と合成」で評価された人工分子マシンの研究は急速に進展しつつあるが、それを発展させ、個別の分子ロボットを作り、さらに多数の 分子ロボットを集合、集団として機能性を持たせ、目的とする仕事をこなすとする分子群ロボットの研究が、分子ロボティックスという新しいパラダイムとして現れてきている。そのような分子ロボットが直接、身体の中で治療にあたる、ということも可能になるかもしれない。この分子ロボットの研究には、多くの科学分野の進展が寄与しているが、特に超分子化学、生命科学、ナノテクノロジー、インフォマティックスの貢献が大きい。
Science and Technology of Advanced Materials に発表された北海道大学、角五 彰らによるレビュー論文 Molecular swarm robots: recent progress and future challenges の中で、著者らは「分子ロボットは、合成化学や製造業、さらには人工知能といった分野に、新しい次元で発展をもたらすことが期待されている」として、最近の分子ロボティックスの進展について紹介している。
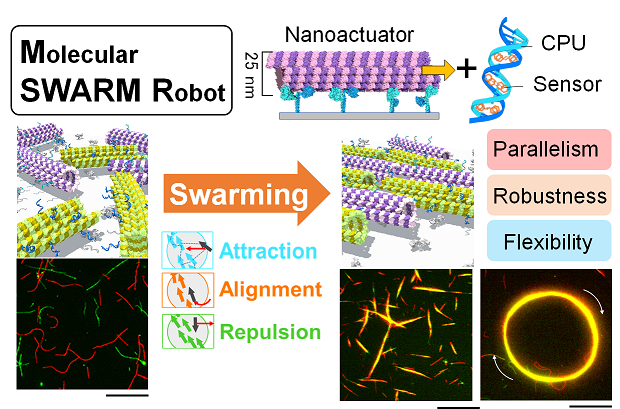
分子ロボットは、それぞれ、「知能、制御系」であるプロセッサーないしは論理ゲート、「駆動系」であるアクチュエーター、外部環境の情報を取り込み、命令のオン、オフを切り替える「センサー」、といった3つの機能を持つ異なる分子素子の組み合わせによって作られた統合システムと言える。重要なのはこの分子ロボット集合体の動作を制御することであり、それによって、分子群ロボットは同時に複数の動作を行うことができるようになる。この目的を達成するための分子ロボットを構成する鍵になる各要素素材は、微小管/キネシン、単鎖DNA、感光性分子化合物である。
微小管/キネシンが分子ロボットの駆動系で、化学エネルギーを運動エネルギーに高い効率で変換して、分子ロボットを動かすことになる。単鎖DNAは情報処理プロセッサーの役割を持つ。DNAはよく知られるように生体内の遺伝情報の保存と伝達を担う物質で、多量のデータを保存するとともに、複数の機能を同時にこなすことができる優れた能力を持っている。感光性分子化合物、アゾベンゼン誘導体が分子ロボットのセンサーの役割をし、分子ロボットのオン/オフのスイッチ動作を行う。
自律的に動作する個別の分子ロボットに近接相互作用を起こさせ、グループ化させるためにDNAの高い分子認識能を利用する。分子ロボットの相互作用を仲立ちするように設計された相補的なDNAを入力信号として用いると、多数の分子ロボットが基板にコートされたキネシンの上を滑って大きな集まりを作る。この時、分子ロボットを構成する微小管の長さと硬さを適当に調整することで、分子群ロボットの形状を制御できる。比較的硬いロボットは一軸方向にのびた棒状に集合し、他方、柔らかいロボットは回転する環状に集合する。
さらに進んで、別々の分子ロボットのグループを、同時に、異なった形状を取りながら集合させるという試みも行われている。そのためには同時に複数の動作が行われなくてはならない。硬い分子ロボットに対応するように設計されたDNA信号で一軸方向にのびた棒状に集合させ、同時に、柔らかい分子ロボットに対応するように設計された別のDNA信号で、回転する環状に集合させることに成功している。
光センサーのアゾベンゼンが、この分子ロボットの集合をオン、オフするスイッチとして用いられている。アゾベンゼンが紫外光を受光したその情報を受けたDNAが、集合している分子ロボットを解散(オフ)させ、可視光を受光した時には集合(オン)させる。
「ロボットは大きいものでセンチメーターサイズ、小さいものでナノメーターサイズまで小さくできる。集合に参加する分子ロボットの数は1000から100万まで増やすことができる。情報の処理、保存、伝達という今後の利用を考えれば、分子ロボットにはさらに改良が加えられ、最適化される必要がある。また、分子ロボットのエネルギー効率や再使用性と言った利点を活かしながら、寿命という課題を克服する必要がある。」と著者らは述べている。
論文情報
- 著者
- Arif Md. Rashedul Kabir, Daisuke Inoue and Akira Kakugo
- 引用
- Sci. Technol. Adv. Mater.21(2020)323.
- 本誌リンク
- http://doi.org/10.1080/14686996.2020.1761761